

Pyörimisnopeusanturit
Asentoanturit moottorinohjauksessa
Pyörimisnopeusanturi antaa moottorinohjaukselle tietoa sekä pyörimisnopeudesta että kampiakselin asennosta. Kumpikin näistä on tietoja joita ilman moottori ei voi toimia. Eli voisi sanoa että moottorin yksittäinen tärkein tieto on se mitä kampiakselin asentoanturi moottorinohjaukselle kertoo.
Kampiakselin asentoa käytetään tapahtumien ajoittamiseen moottorin käydessä. Selkein esimerkki tästä lienee sytytystapahtuma. Yleensä kipinä halutaan antaa moottorille karkeasti 10-35 astetta ennen männän saapumista yläkuolokohtaan (poikkeuksia tähän on, mutta ei syvennytä siihen vielä sen enempää). Ja kipinän oikea aikainen ajoittaminen on ehdottoman tärkeää ja mielellään se pitäisi olla mahdollista asettaa jopa asteen osina, eli 0,1 asteen tarkkuudella. Pienemmälläkin tarkkuudella pärjää, mutta tuo tarkkuus on sellainen jolla säätötuloksesta saa monella tapaa hyvän.
Toinen mitä kampiakselin asentoanturilta saadaan on pyörimisnopeustieto. Tätä tietoa käytetään varsinkin erilaisten karttojen toisena akselina, esimerkiksi polttoaine ja sytytyskartat pohjaavat siihen kuinka nopeasti moottori pyörii.
Nokka-akselin asentoanturia käytetään ensisijaisesti vain siihen tietoon että onko 4-tahtisessa moottorissa kumpi yhtä aikaa ylhäällä olevista sylintereistä työtahdissa, eli kummassako niistä tapahtuu - tai pitäisi tapahtua - palamista. Toinen sylintereistähän on sillä hetkellä pakotahdin lopussa, ja aloittamassa uutta imutahtia, jolloin siellä ei palamista voi tapahtua. Nokka-akselin tai -akseleiden asentoanturia voidaan myös käyttää jos moottorissa on moottorinohjauksen säätämät nokka-akseleiden ajoitusjärjestelmät (esimerkiksi BMW VANOS), tällöin ne kertovat myös nokka-akseleiden asennon suhteessa kampiakseliin ja näin ollen niitä voidaan kontrolloida tarkasti moottorin eri käyntitilanteissa.
Antureiden eri tyypit
Pääasiassa moottorinohjauksissa käytetään joko VR tai Hall tyyppistä anturia. Vaikka niiden tehtävä on sama, niin toimintaperiaate on ihan erilainen.
VR
VR, eli induktiivinen anturi. Tämä anturi on periaatteessa hieman kuin nurinkurinen sähkömagneetti, eli anturin edestä liikkuva metalli indusoi jännitteen anturin kelalle. Ilman liikettä jännitettä ei myöskään synny. Syntyvän jännitteen suuruus vaihtelee sekä sen mukaan että kuinka nopeasti anturin edestä metalli kulkee, että anturin etäisyydestä metalliin. VR anturi tuottaa hieman siniaallon muotoista jännitettä, eli hampaan keskikohtaa lähestyttäessä jännite nousee plussan puolelle, ja hampaan keskikohdasta pois päin mentäessä siirrytään miinuksen puolelle. Jos anturin napaisuus on väärin päin, niin tuo myös toiminta on toisin päin, eli ensin mennään miinukselle ja sen jälkeen plussalle. Koska VR anturin ominaisuuteen kuuluu että tuo aallon leveys (eli jännitteen nousun alkamiskohta) riippuu siitä, kuinka nopeasti mitattava kohde liikkuu, niin on ehdottoman tärkeää että anturin napaisuus on oikein päin. Tämä siksi että moottorinohjaus seuraa nimenomaan sitä plussalla olemisen jälkeen tippuvaa reunaa signaalista, koska se on ainoa kohta VR anturin signaalista joka pysyy paikallaan suhteessa moottorin asentoon, kierrosluvusta riippumatta.
Yleensä moottorinohjaus lukee myös nousevaa signaalia, ja yleensä sen triggaus tapahtuu jollain määritellyllä jännitetasolla. Nyt kun anturilta tuon määritellyn jännitetason ylittävä jännite eri kohdassa, riippuen moottorin pyörimisnopeudesta, niin sen pohjalta määritelty sytytysennakko ei pysy vakaana pyörimisnopeuden muuttuessa.
Megasquirtissa tuon väärän napaisuuden huomaa helposti käyttämällä High Speed Loggers välilehdeltä löytyvää Tooth Loggeria. Normaalin triggeripyörän kanssa pitäisi signaalin näyttää seuraavanlaiselta moottorin käydessä:
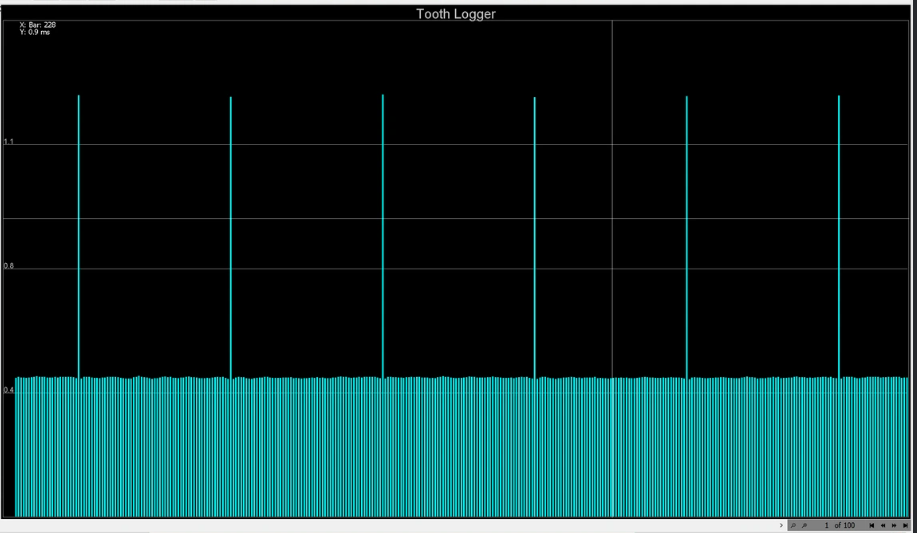
Kunnossa oleva kampiakselin asentoanturin signaali
Eli kyseisessä kuviossa jokainen tolppa on aika kuinka pitkä aika hampaiden välillä kuluu. Ja luonnollisesti sitten puuttuvien hampaiden kohdalla kuluva aika on suurempi. Eli, sen vuoksi se on pidempi kuin muut.
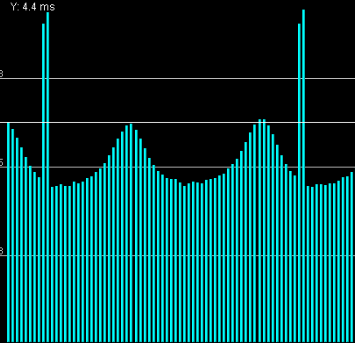
Anturin napaisuus väärin päin.
Jälkimmäisessä kuvassa napaisuus on selkeästi väärin päin. Sen havaitsee tuosta että muita pidempiä tolppia on kaksi vierekkäin. Niistä toisiksi pidemmän pituus voi vaihdella, mutta joka tapauksessa sen pitäisi olla aikalailla noiden lyhyiden tolppien mittainen ja ainoastaan yksi pitkä tolppa. Tässä kuvassa näkyvä aaltomuoto on sitten taas normaalia jos tooth logger otetaan käynnistyksen aikana. Aaltomuoto tulee pyörimisnopeuden vaihtelusta starttauksen hetkellä, ja siitä voi vaikka tarkistaa että kaikissa sylintereissä on jotakuinkin normaali puristus :) Eli aallon pidemmät tolpat on pyörimisnopeuden hidastumista kun joku sylintereistä on puristustahdissa.
Hall
Hall anturi on sitten taas niin kutsutusti aktiivinen anturi, eli vaatii oman virransyötön toimiakseen. Menemättä sen syvällisemmin siihen miten Hall anturi sen hampaan tunnistaa, niin signaali mikä sieltä tulee toimii käytännössä siten että anturin signaalijohto menee maihin (=0V), silloin kun hammas on anturin edessä ja ei maadoitettu silloin kun hammas ei ole edessä. Sitten tullaan siihen että Hall-antureita on kahden tyyppisiä. Suurin osa vastaan tulleista on sellaisia että ne ainoastaan maadoittavat silloin kun metalli on anturin edessä, mutta eivät tee mitään kun ei ole. Eli silloin signaalijohdon jännite jää “kellumaan”, käytännössä saattaa olla mitä tahansa, mutta yleensä ei sitä mitä toivotaan. Tämä saadaan korjattua sillä että laitetaan ylösvetovastus signaalijohdon ja anturin jännitesyötön välille. Yleensä noin 1k ohm vastus on hyvä. Esimerkiksi Megasquirtin tapauksessa tätä ei ole pakko tehdä nimenomaan anturin kytkentään, ja Fullestin myymissä Megasquirteissa on sisälle asennettu jumpperi, jolla kyseisen ylösvedon saa joko käyttöön tai pois tarpeen mukaan. Linkin moottorinohjauksissa kyseisen ylösvedon saa kytkettyä ihan asetuksista päälle
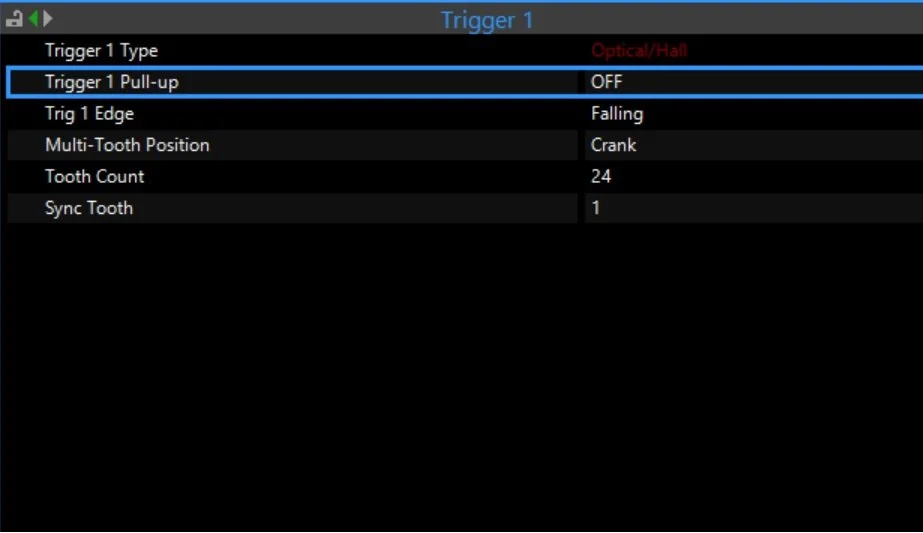
Link Trigger Pull-up
Eli kyseessä on moottorinohjauksesta riippuvainen tapa että miten tuon saa päälle, mutta toimintaperiaate on joka tapauksessa sama. Ja tavoitteena on että silloin kun anturi ei maadoita, niin signaali nousee ylös, esimerkiksi +12V jännitteeseen. Ja vastus tarvitaan siksi että anturin maadoittaessa se kytkisi muuten +12V jännitteen suoraan maihin ja näin ollen syntyisi oikosulku aina kun hammas tulisi anturin eteen. Ja koska moottorinohjaus lukee sähköistä signaalia paremmin kuin savumerkkejä, niin tuo on suositeltava tapa.
Mistä sitten tietää tarvitseeko Hall-anturi ylösvetovastuksen vai ei? Helppoa, yleismittari riittää. Mittaa signaalijohdon ja maan väliltä (eli toinen johto signaalijohtoon ja toinen maihin. Ja virta päällä niin että anturi saa myös virran. Jos vie hampaan (tai muun metallin) anturin eteen ja ottaa pois, niin jännitteen muutos pitää olla useita voltteja. Riippuen kytkennästä, esimerkiksi noin 0V - noin 5V. tai noin 12V. Ikinä ei ihan noita ääripäitä saavuteta, mutta tärkeintä on että muutos on vähintään sen luokkaa 3V. Tällöin ylösvetovastus joko on jo jossain tai sitä ei tarvita. Jos jännite muuttuu ainoastaan 0,2-0,5V tjsp, niin silloin anturi kaipaa ylösvetovastuksen lisäämisen.
Triggausjännite
Taas riippuen vähän moottorinohjauksesta, kuinka tämä on toteutettu, käytetään esimerkkinä Link moottorinohjausta.
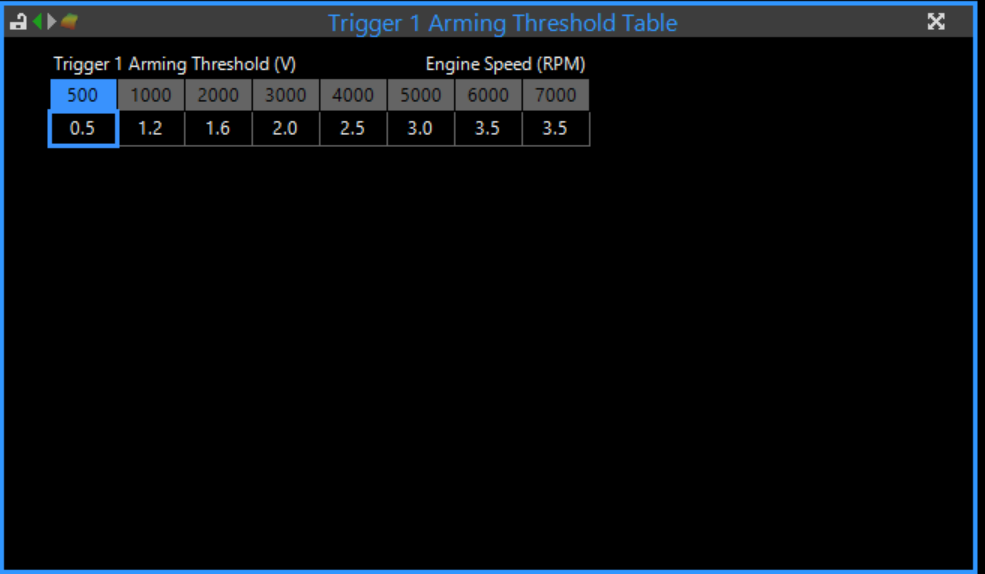
Kyseessä on yleensä ainoastaan VR anturin kanssa käytettävä asetus, jonka tarkoituksena on pystyä reagoimaan VR anturilta tulevaan, pyörimisnopeuden mukana muuttuvaan jännitteeseen. Välttämättä tähän ei tarvitse edes sattua, eli jos ongelmia ei ole, niin antaa olla sellaisenaan. Asetettava jännite on jännite jota suuremman jännitteen VR anturin pitää pystyä tuottamaan, jotta moottorinohjaus tunnistaa sen nousevaksi jännitteeksi ja jää odottamaan sitä laskevaa reunaa. Eli, jos anturilta ei tule riittävän suuri jännite, niin sitä ei lueta ollenkaan.
Tällä saadaan pienet häiriöt signaalissa jätettyä huomioimatta, jolloin moottorinohjaus saa luettavakseen puhdasta signaalia. Koska pienillä kierroksilla / startatessa anturin tuottama jännite on pienempi, pitää siellä olla pienempi arvo. Isommilla kierroksilla jännite voi olla suurempi ja näin ollen sillä pystytään selviämään vähän isommistakin häiriöistä.
Häiriöt
Häiriöt varsinkin kierroslukusignaalissa aiheuttaa sen että moottorinohjaus joko näkee ylimääräisiä hampaita, tai vaihtoehtoisesti ei pysty lukemaan kaikkia hampaita. Useinkin moottorinohjauksiin on ohjelmaan rakennettu ominaisuus joka tutkii onko hampaita asetettu määrä, puuttuvien hampaiden välillä ja jos ei, niin sytytys ja suihkutus yleensä katkaistaan siksi aikaa kunnes taas tiedetään missä mennään. Tämä siksi että esimerkiksi kipinää ei häiriöstä johtuen sytytetä vaikka 10 astetta ennen kuin pitäisi ja näin ollen aseteta moottoria vaaraan. Yleensä tämä aiheuttaa myös vikakoodin moottorinohjaukselle, esimerkiksi Megasquirtin tapauksessa logista on nähtävissä Loss Sync Reason, josta on pääteltävissä että jäikö joku hammas lukematta vai näkikö moottorinohjaus liikaa hampaita.
Häiriöstä riippuen sitten toimenpiteet sitä mukaa. Liikaa hampaita on yleensä esimerkiksi sytytyslaitteista johtuva ongelma. On ensisijaisen tärkeää että kupariydinjohtoja käytettäessä sytytystulpasta löytyy häiriönpoistovastus (yleensä tulpan koodissa merkintä R), tai vaihtoehtoisesti sytytysjohdoissa on vastus itsessään. Jompi kumpi on oltava, muuten syntyvät häiriöt ovat varsin suuria. Yleensä myös COP puolien kanssa on hyvä olla vastuksella olevat sytytystulpat.
Ja tässä kohtaa ei voi tarpeeksi painottaa hyvin tehdyn johtosarjan ja oikean (moottoriohjauksen valmistajan ohjeiden) mukaisen maadoituksen merkitystä. Ylivoimaisesti suurin osa häiriöistä johtuu jollain tavalla virheellisestä johtosarjasta, huonosta maadoituksesta joko moottorinohjauksen tai sytytyslaitteiden taholta. Valmistajan ohjeistusta kannattaa noudattaa.
Muita syitä häiriöille saattaa olla huono kampiakselin asentoanturin tuki, huono triggeripyörä, anturi ei ole oikeassa kohdassa triggeripyörää sivuttaissuunassa jne. Paras tapa ongelman metsästämiseen on miettiä ja kokeilla.